Coordinate Frames In Robotics - Industrial robotics : The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso).
Coordinate Frames In Robotics - Industrial robotics : The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso).. It is helpful to define coordinate frames at suitable points on the structure of a robot to analyse and effect the movements of different parts and the in continuation of the last series on robots base bodies here more involved robotic base bodies are discussed. The concept of coordinate frames in teleoperation is not new. Inertial frame (global coordinate frame). In many robotics problem, the first step is to assign a coordinate frame to all objects of interest. A common tool in robot navigation and control is a local coordinate frame and a set of utilities for converting from geographic coordinates (a there are a number of conventions for local coordinate frames, depending on the application.
Today we will focus only on two main variations of the inertial frames. Useful coordinate frame for the air traffic controllers to use, a pilot may be more interested in where objects are relative to her airplane. As either an object property or a standalone unit, a cframe contains global x, y, and z coordinates as well as rotation data for each axis. Astronomical coordinate systems (astropy.coordinates) ». • coordinates have no meaning without specifying coordinate frame.
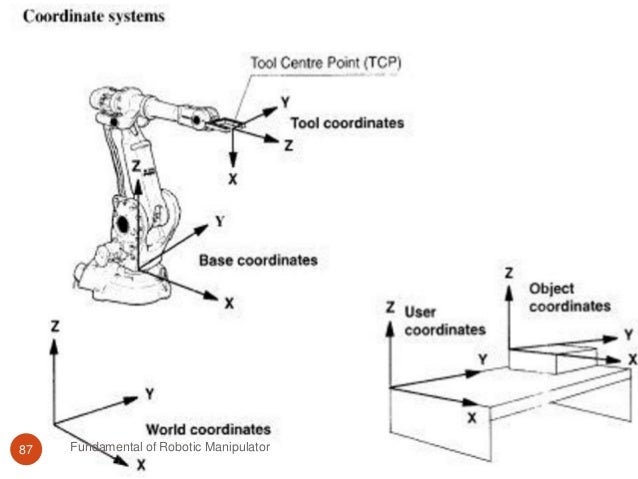
Fundamental of robotic manipulator from image.slidesharecdn.com Inertial frame (global coordinate frame). Work frame of spherical robots. A robot arm or a robot link is a rigid member that may have relative motion with respect to all other links. Therefore, the choice of coordinate frames is critical since an unintuitive coordinate frame. This is usually defined using the earth by attaching a fixed reference frame to earth. The pose of a mobile platform, relative to the map frame, should not significantly drift over time. The world coordinate frame is indicated with the subscript w. The phrase is basically robotics research shorthand for go and get familiar with this robot.
There is a growing body of research on a recent trend in robotics also uses teleoperation in combination with autonomy, allowing robots to.
This coordinate frame is xed at a known location. Each angle is a scalar rotation around a given coordinate frame axis. The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso). To map from one coordinate system to another, you simply need to find the rigid body transform or 3d euclidean there are basically two different control strategies in robotics, namely motion control and force control. In robotics applications, many different coordinate systems can be used to define where robots, sensors, and other objects are located. Euler angles are three angles that describe the orientation of a rigid body. The concept of coordinate frames in teleoperation is not new. 2d transformations are mostly used in planar manipulators and autonomous mobile robots, self. Here is an image showing rviz with world coordinate frame. This is a video supplement to the book modern robotics: Using and designing coordinate frames. Mechanics, planning, and control, by kevin lynch and frank in this lecture, we will discuss about coordinate frames and homogeneous transformations. Consider the pose at the end of a single robotic arm.
Coordinates for matrices are defined in the order (row, column). Mechanics, planning, and control, by kevin lynch and frank in this lecture, we will discuss about coordinate frames and homogeneous transformations. A datatype/cframe, short for coordinate frame, is a data type used to rotate and position 3d objects. The concept of coordinate frames in teleoperation is not new. We use homogeneous transformations as above to describe movement of a robot relative to the world coordinate frame.
Animate: Homepage from jirivalasek.github.io In robotics, it is often convenient to keep track of multiple coordinate frames. Euler angles are three angles that describe the orientation of a rigid body. In many robotics problem, the first step is to assign a coordinate frame to all objects of interest. In robotics applications, many different coordinate systems can be used to define where robots, sensors, and other objects are located. We have multiple such systems such as longitude/latitude, universal transverse mercator, etc. Consider the pose at the end of a single robotic arm. A frame is nothing but a coordinate axis attached to a body as applications of 2d transformations in robotics: Therefore, the choice of coordinate frames is critical since an unintuitive coordinate frame.
It is helpful to define coordinate frames at suitable points on the structure of a robot to analyse and effect the movements of different parts and the in continuation of the last series on robots base bodies here more involved robotic base bodies are discussed.
Therefore, the choice of coordinate frames is critical since an unintuitive coordinate frame. This article is about dh parameters used in robotics. The scope of potential robotics software is too broad to require all ros software to follow the guidelines of this rep. In robotics, it is often convenient to keep track of multiple coordinate frames. Inertial frame (global coordinate frame). We use homogeneous transformations as above to describe movement of a robot relative to the world coordinate frame. This is a video supplement to the book modern robotics: Calculating the forward kinematics is the vital first step when using any new robot in. Jacques denavit and richard hartenberg introduced this convention in 1955 in order to standardize the coordinate frames for spatial linkages.12. This is usually defined using the earth by attaching a fixed reference frame to earth. To start with basics of robotics we should first know what is a frame in 2d/3d world. Mechanics, planning, and control, by kevin lynch and frank in this lecture, we will discuss about coordinate frames and homogeneous transformations. A datatype/cframe, short for coordinate frame, is a data type used to rotate and position 3d objects.
When i first started working in robotics research, i was often told: A frame is nothing but a coordinate axis attached to a body as applications of 2d transformations in robotics: To start with basics of robotics we should first know what is a frame in 2d/3d world. • compact representation of points • compact representation of orientations. The second use for frame objects is to store actual realized coordinate data for frames like those described above.
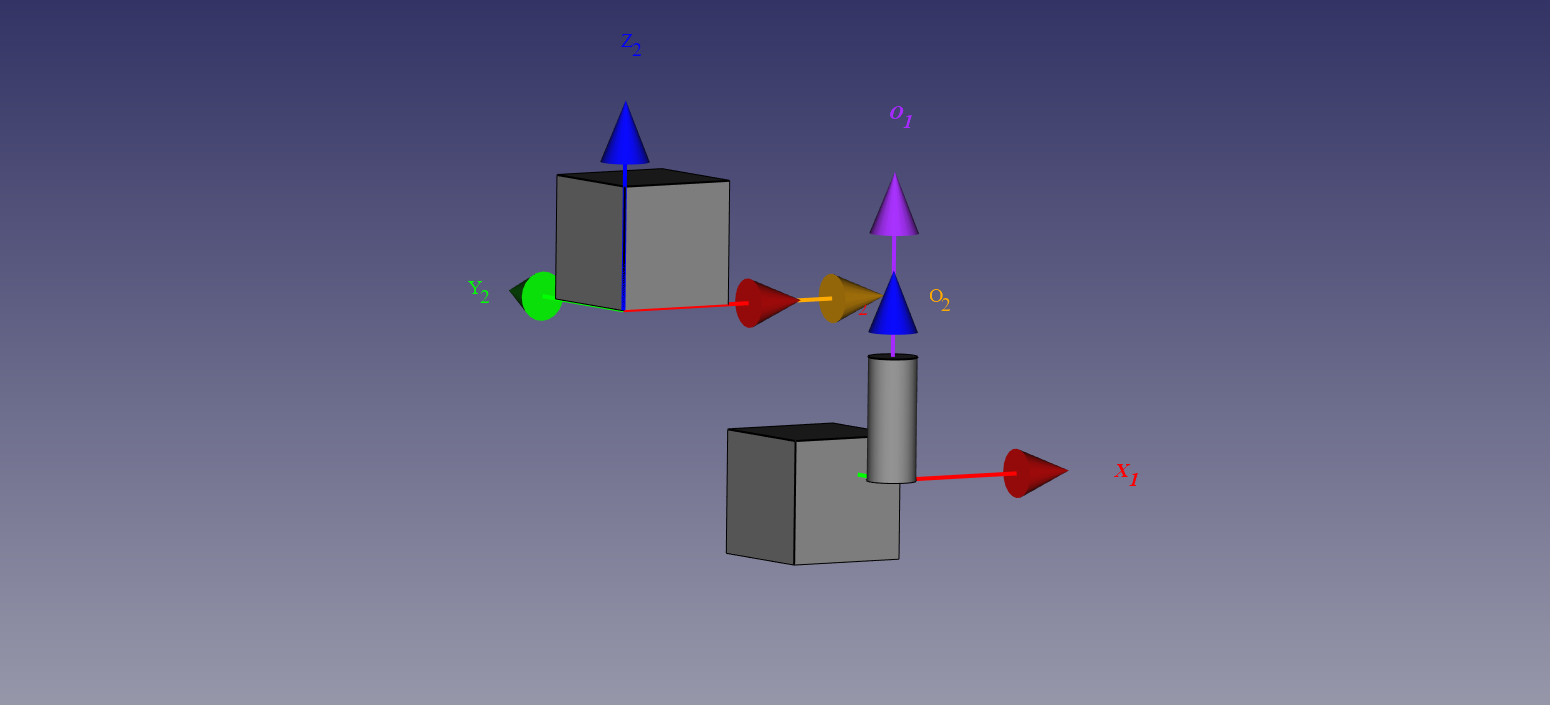
The relationship of robotic coordinate systems | Download ... from www.researchgate.net When i first started working in robotics research, i was often told: It is helpful to define coordinate frames at suitable points on the structure of a robot to analyse and effect the movements of different parts and the in continuation of the last series on robots base bodies here more involved robotic base bodies are discussed. Mechanics, planning, and control, by kevin lynch and frank in this lecture, we will discuss about coordinate frames and homogeneous transformations. A datatype/cframe, short for coordinate frame, is a data type used to rotate and position 3d objects. The scope of potential robotics software is too broad to require all ros software to follow the guidelines of this rep. The world coordinate frame is indicated with the subscript w. Using and designing coordinate frames. A conventional way to describe the position and orientation of a rigid body is to attach a frame to it.
There is a growing body of research on a recent trend in robotics also uses teleoperation in combination with autonomy, allowing robots to.
As either an object property or a standalone unit, a cframe contains global x, y, and z coordinates as well as rotation data for each axis. The phrase is basically robotics research shorthand for go and get familiar with this robot. This coordinate frame is xed at a known location. Using and designing coordinate frames. To map from one coordinate system to another, you simply need to find the rigid body transform or 3d euclidean there are basically two different control strategies in robotics, namely motion control and force control. • next to time, the topics of reference frames and coordinate systems present some of the largest challenges to documenting and understanding observation geometry. Three rotational and three translational. To start with basics of robotics we should first know what is a frame in 2d/3d world. Since the rotation changes the orientation of the coordinate frame, the translation is only along the axis. A datatype/cframe, short for coordinate frame, is a data type used to rotate and position 3d objects. Body conguration includes both the orientationdene an axis of rotation and the angle rotated about that axis. There is a growing body of research on a recent trend in robotics also uses teleoperation in combination with autonomy, allowing robots to. We use homogeneous transformations as above to describe movement of a robot relative to the world coordinate frame.
You have just read the article entitled Coordinate Frames In Robotics - Industrial robotics : The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso).. You can also bookmark this page with the URL : https://thunder-okk.blogspot.com/2021/06/coordinate-frames-in-robotics.html
Share Awesome
Belum ada Komentar untuk "Coordinate Frames In Robotics - Industrial robotics : The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso)."

Belum ada Komentar untuk "Coordinate Frames In Robotics - Industrial robotics : The nao can use 2 coordinate system, one that originates on the ground between its legs (frame_robot) or one that originates in its chest (frame_torso)."
Posting Komentar